
Un bus es un sistema formado por elementos electrónicos (como cables y circuitos) que permiten la transferencia de información entre distintos componentes de un mismo hardware. Basándose en esta tecnología, en la década de los 80 la empresa Bosch creó el sistema CAN bus para coches, del que Intel y Philips fueron los primeros fabricantes.
Con el paso del tiempo, el CAN bus se extendió a otros sectores debido a los beneficios que aporta y, en 1993, el sistema se estandarizó a nivel internacional con la publicación de la norma ISO 11898.
¿Qué es el CAN bus?
El sistema CAN bus (Controller Area Network) es un protocolo de comunicación mediante el cual distintos dispositivos de un coche pueden intercambiar información entre sí. Para ello, no es necesario un ordenador matriz (host), pues cada subsistema electrónico del coche tiene su propia ECU (unidad de control electrónico).
En la práctica, el protocolo CAN permite, por ejemplo, que los sensores de lluvia se comuniquen con los del limpiaparabrisas para activarlo, y estos a su vez se pueden comunicar con los sensores de los frenos para reducir la velocidad mientras se retira el agua del parabrisas. Esta dinámica de funcionamiento aumenta su complejidad en los coches más sofisticados que tienen funcionalidades como la de conducción autónoma. En este caso, todos los sensores del coche se mantienen sincronizados mediante el CAN bus para garantizar una conducción segura y estable, sin márgenes de error que puedan producir accidentes. Esto incluye los sensores de velocidad, de frenado, de proximidad, de clima, de geolocalización, de alertas al conductor, etc.
El primer coche en utilizar el CAN bus fue el Mercedes-Benz W140 clase S (1991), en el que fueron implementados 5 nodos del protocolo CAN. Desde entonces, la mayoría de vehículos son ensamblados y configurados con este sistema.

Características del sistema CAN bus
Las principales características del CAN bus son las siguientes:
- La información transmitida dentro del sistema se encuentra en código binario.
- El protocolo CAN está orientado a mensajes, esto quiere decir que la información que se envía de un dispositivo a otro primero se descompone en mensajes, los cuales se identifican y encapsulan por separado para ser enviados por tramos.
- El canal de comunicación CAN es bidireccional (cada dispositivo es emisor y receptor de datos).
- El hecho de eliminar uno o más nodos no afecta al sistema CAN, ya que el resto siguen interconectados. Gracias a ello, la configuración de la red de comunicación es flexible.
- Los mensajes se transmiten por orden de prioridad. Por ejemplo, los mensajes relacionados con el sistema ABS son más importantes que los relacionados con el cambio automático.
Componentes del sistema CAN bus
El sistema CAN bus tiene los siguientes componentes:
- Cable CAN bus de datos. Es el canal por donde fluye la información y está compuesto por dos tipos de cables entrelazados (cable CAN-High o H y cable CAN-Low o L).
- Elementos finales del bus de datos. Son las resistencias que se encuentran en los extremos de los cables H y L.
- Controlador CAN. Se encarga de acondicionar la información que se envía y se recibe entre la ECU y el transmisor-receptor.
- Transceptor CAN. Es el elemento que recibe y transmite la información.
Todos los elementos del CAN bus se encuentran alojados en las ECU, a excepción del cable bus de datos.
Ventajas del CAN bus
La mayor ventaja del CAN bus es que el cable de datos funciona como un gran canal en el que transita la información proveniente de todos los dispositivos dentro del coche. Así, este sistema reemplaza a los modelos tradicionales de comunicación que utilizaban gran cantidad de cables, haciendo que los componentes del coche fuesen más complicados de configurar, de diagnosticar y de reparar.
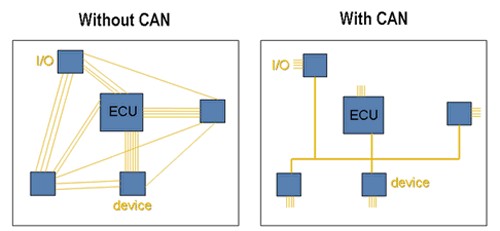 Créditos: National Instruments
Créditos: National Instruments
De esta manera, gracias al sistema CAN bus el coche resulta más ligero y económico, y la comunicación entre sus sensores es más directa y rápida.
Fallas en el sistema CAN bus
El CAN es uno de los cinco protocolos incluidos en el estándar OBD-II para el diagnóstico de coches. Sin embargo, el escáner OBD-II solo es capaz de identificar problemas básicos, no las complejas fallas en el sistema CAN bus.
Para diagnosticar el sistema es necesario utilizar un osciloscopio, herramienta del taller que permite conocer la señal de las ondas de la línea CAN Bus, pues en esta transita información digital en código binario, por lo que no solo se debe medir el voltaje.
Habiendo aclarado esto, las principales fallas en el sistema CAN bus según el estándar ISO 11898 son las siguientes:
- CAN_H o CAN_L interrumpido
- CAN_H o CAN_L en cortocircuito al voltaje de la batería
- CAN_H o CAN_L en cortocircuito a tierra
- CAN_H y CAN_L interrumpidos en la misma ubicación
- CAN_L en corto a cable CAN_H
- Pérdida de conexión a la red de terminación
Antes de comenzar cualquier proceso de diagnóstico y reparación del CAN bus, es recomendable hacer una copia de seguridad de la programación del sistema, ya que, por ejemplo, una sonda mal colocada puede borrar por completo la memoria de toda una línea CAN.
Fecha de actualización: 4 de diciembre de 2023









